Just a quick update. I finally have my own domain: tir38.com. This blog will now be available at that domain, however, the old http://jason.ithought.org will still direct you to all the correct pages. Chris Kelly is still providing all of my excellent hosting and has upgraded the ithought machine with a lot of new hardware that I don’t really understand (honestly, I pay him so that I don’t have to understand). If you need hosting service, I couldn’t recommend anyone better. He’s organized everything into an easy-to-manage front page. On another note, one of my proudest accomplishments of 2008 has to be a complete conversion over to Linux OS. I’m running Ubuntu 8.10 on my home machines. I’ll probably upgrade my work horse to a less “entry level” distro some time in the new year, but for now I’m enjoying being completely Windows free! I have a lot of projects nearing completion and some other awesome news that I’ll post about in the new year. Happy 2009!
Tag: computers
SLAM-5 Bot part 2: The Control Algorithm
After assembling the hardware for my SLAM (Simultaneous Localization and Mapping) robot, I set about to write the code which controls the drive motors, senses obstacles, and records the robot’s path. Lego’s NXT kit comes with a rather basic visual programming language called NXT-G. This program, which constructs programs by creating essentially flow charts, is almost counterintuitive to anyone with command line programing experience. I decided instead to use the third-party programming language called Not eXactly C (NXC) and its associated IDE, Bricx Command Center. Continue reading “SLAM-5 Bot part 2: The Control Algorithm”
Reporting In From The FIRST Lego Robotics Competition
Last month the FIRST Robotics National Championship was held at the Georgia Dome, only several blocks from my house, so I ventured over to report on the events lasting from Wednesday to Saturday. The entire extravaganza was sponsored by Vex, Lego, and NASA, amoung others. The National Championship in Atlanta is the culmination of regional competitions throughout the US and Canada. Three separate events were simultaneously taking place under one roof. The FIRST Lego League (FLL) and FIRST Tech Challenge (FTC) are both kit-based problem solving competitions for kids aged 9-14 and high school students. Additionally, the FIRST Robotics Competition (FRC) is an open-ended design competition which allows high school students the freedom to construct their robot from the materials of their choosing. The three competitions are entirely different; each has a unique playing field, set of objectives, and scoring method. Continue reading “Reporting In From The FIRST Lego Robotics Competition”
SLAM-5 Bot part 1: The Hardware
I recently purchased Lego’s new NXT hobbyist robotics kit. After familiarizing myself with the basic layout of the command module, available hardware and sensors, and third-party programing languages by building several single-task robots, I decided to use the NXT as a forum for my studies in SLAM robotics. As I have previously quoted, Dr. John Leonard of MIT says,
The problem of SLAM is stated as follows: starting from an initial position, a mobile robot travels through a sequence of positions and obtains a set of sensor measurements at each position. The goal is for the mobile robot to process the sensor data to produce an estimate of its position while concurrently building a map of the environment.
My goal and new perspective on the problem is to design a system which is as simple as possible. I immediately realize that much of the complication in SLAM systems lays in the timeliness with which the system processes information in real time. I know that some compromise between speed and simplicity had to be established, and in pursuing the most simple system, I am willing to sacrifice a lot in speed. So I have created what I am calling the “slam five robot”. The real acronym is S.S.S.S.S.L.A.M. which stands for “super-simple, super-slow, simultaneous localization and mapping robot”.
The system consists of three components: the physical hardware of the robot, the control algorithm which guides the hardware and sensors, and the post processing algorithm which interprets the sensor data. I begin here by describing the hardware and sensor setup.

Front view of the SLAM-5 bot, showing ultrasonic range finder and wiring for the drive motors.
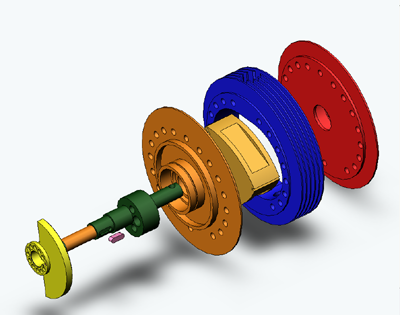
Wankel Rotary Engine CAD conversion
3/7/2017 UPDATE: A commenter made some nice updates to both the translation and the geometry of the project. Be sure to read Martin’s comments below.
1/2/2014 UPDATE: After some interest from other folks in this project, I’m sharing all of my final Solidworks files. I’ve talked with the original sponsor and he has agreed to release them. You can download a zip file here. The files are organized by part. All of the final drawings and parts are annotated with “_finished” in the filename. Some of the original scans are also included.
3/31/2013 UPDATE: A kind reader has found the original drawings in a model airplane magazine from 1964. I’ve included the PDF below in the Resources section. The blue prints are on pages 17-18. It is interesting to note that the model was submitted as an entry to a contest to generate an epitrochoidal engine (an epicycloid is a type of epitrochoid). However, as I show below, the chamber isn’t an epicycloid.
I have been contracted to convert the SW92 Wankel rotary engine from its original 1950’s paper format (in German) to electronic format (in English). I am utilizing Solidworks 2005 to reconstruct 13 of the 36 pieces included in the blueprints. Furthermore, I am relying on a tremendous effort from MacField Young to perform most of the German to English translations. The sole purposes of this blog entry are to communicate with my contractor, to document my progress, and relay certain concerns. In other words, this entry is a work in progress finished!.