I’d posted before about working as an electro-mechanical engineer. Eventually, I left that position to attend grad school. I never wrote about finishing up my work, and left much unmentioned in my prior post. I hope wrap up my involvement at ____ by talking about and showing off some of the projects I was responsible for.
Tag: robots
Grad School, Peace Out!
Its official! I’ve graduated. Man, what an experience. This has been one of the most rewarding decisions of my life. Its hard to imagine what will happen next. I have day-dreamed and focused on grad school for so long that I didn’t spend much effort looking past this moment. Continue reading “Grad School, Peace Out!”
CMU Mechatronics Project: Multi-shot Cannon
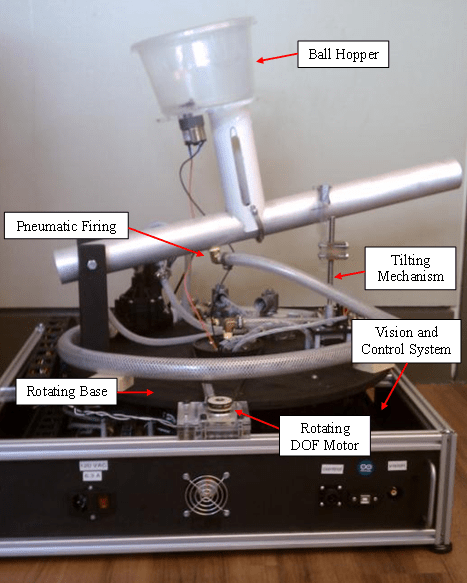
The challenge Design and build a machine that fires Nerf foam balls and hits static and moving targets with great accuracy and speed.
The team Four engineers joined forces to accept the challenge.
<
p align=”center”>
The machine
<
p align=”center”>
Continue reading “CMU Mechatronics Project: Multi-shot Cannon”
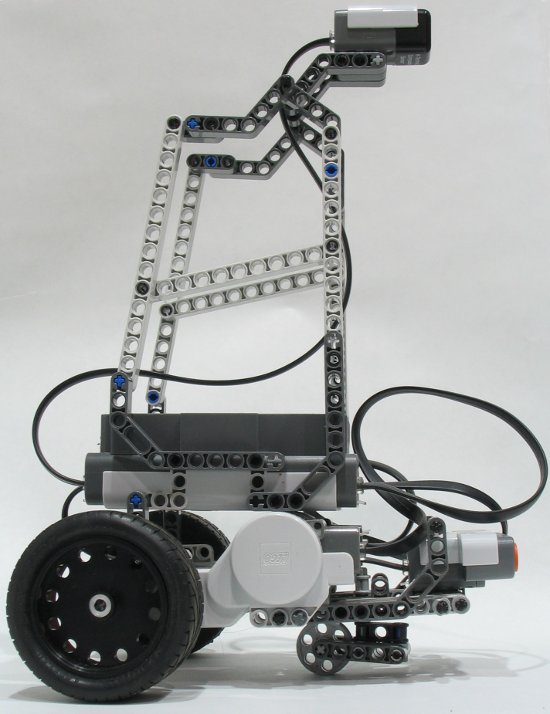
SLAM-5 Bot part 3: Hardware Iteration
So in the course of finishing what would have been part 3 of this project, the post processing, I decided that some design changes needed to be made to the robot. I made two hardware changes: larger drive wheels and the addition of a compass sensor.
Past Project: Input Shaper Testing
As part of my ME degree from Georgia Tech, I had to take a class called Experimental Engineering (ME 4055). It was a senior level class where students worked in teams to complete a project that mimicked the research cycle of a PhD student or professor. The team was required to design and conduct a set of experiments, evaluate the results, and then write a paper. For most students this was a rather bogus class. Students were limited to a small amount of hardware and research areas, and each semester’s reports looked all too similar to previous. I, however, had the very special chance of taking this class with Adam Reich during my semester abroad at Georgia Tech Lorraine (GTL), which meant working with Dr. William Singhose and his PhD student, Jason Lawrence. They were at GTL to teach several other classes (another one I was also in, ME 6401 Linear Control Theory) and to continue/promote their research with a highly portable, miniature gantry crane.
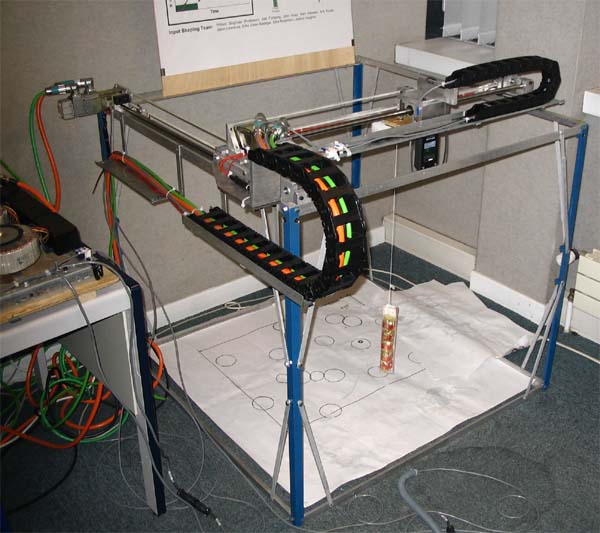
The mini gantry crane setup at GTL. Continue reading “Past Project: Input Shaper Testing”