When I was an undergrad at Georgia Tech, I worked on a research project for a year. I worked part of the time while still in school and continued after I graduated. I didn’t really have a senior design project and most undergrads didn’t do actual “research”. So, I felt pretty lucky to be involved in a real research project, especially given the level of my involvement. I worked with Dr. Harvey Lipkin and his grad student Russell Marzette Jr. Russell and Dr. Lipkin had developed a new way to actuate (bend and position) really large telescope mirrors and it was my job to develop software to model and test this technique. I wrote some MATLAB and ANSYS code to automate all of my tests. What was really cool (and unknown to me prior) was that I could use ANSYS from the command line and write scripts which match a normal GUI work flow in the 3D environment. I could create structures, apply loads, mesh structures, and run simulations all from scripts. This allowed me to create a MATLAB GUI to set parameters (or sets of parameters), create and execute custom ANSYS scripts, and format ANSYS-generated image and text results. I could set a span of parameters and run an entire batch of ANSYS simulations back-to-back. Continue reading “Past Work: Large-Scale Mirror Actuation”
Tag: Georgia Tech
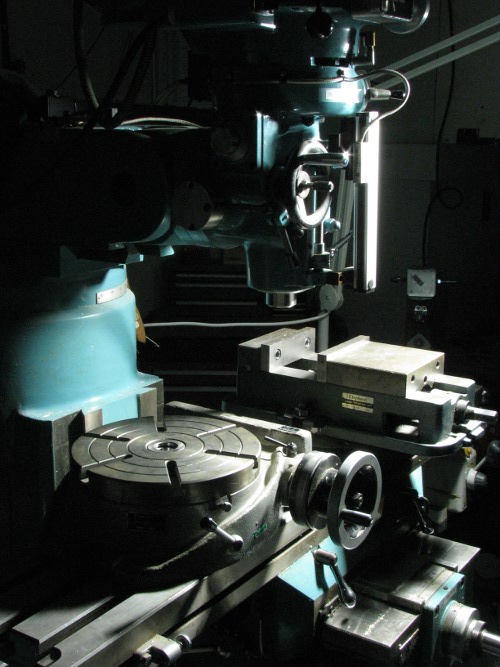
Past Work: Center for Assistive Technology and Environmental Access
I never got around to posting about my time at Georgia Tech’s Center for Assistive Technology and Environmental Access (CATEA), where I was a researcher and shop manager. CATEA designs and tests all sorts of technology to help disabled people. The entire lab is a sort of skunk works operation; imagine Myth Busters “what crazy thing do you want to try today”. I was responsible for bringing to life the ideas and inventions of several Georgia Tech professors and their grad students. I had an entire shop at my disposal and best of all a Georgia Tech VISA card!
Continue reading “Past Work: Center for Assistive Technology and Environmental Access”
Past Project: Input Shaper Testing
As part of my ME degree from Georgia Tech, I had to take a class called Experimental Engineering (ME 4055). It was a senior level class where students worked in teams to complete a project that mimicked the research cycle of a PhD student or professor. The team was required to design and conduct a set of experiments, evaluate the results, and then write a paper. For most students this was a rather bogus class. Students were limited to a small amount of hardware and research areas, and each semester’s reports looked all too similar to previous. I, however, had the very special chance of taking this class with Adam Reich during my semester abroad at Georgia Tech Lorraine (GTL), which meant working with Dr. William Singhose and his PhD student, Jason Lawrence. They were at GTL to teach several other classes (another one I was also in, ME 6401 Linear Control Theory) and to continue/promote their research with a highly portable, miniature gantry crane.
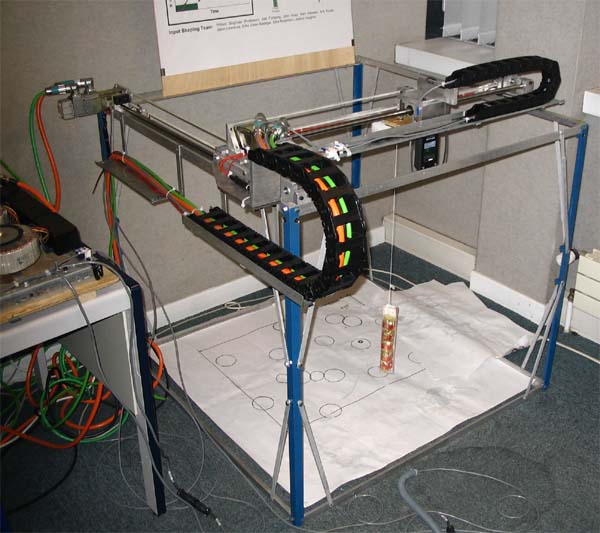
The mini gantry crane setup at GTL. Continue reading “Past Project: Input Shaper Testing”
Dr. Khatib, Georgia Tech RIM Seminar Series
Georgia Tech’s Robotics Initiative has continued the free lecture series this semester. The bad news is that this semester’s schedule has been so poorly advertised to the public (no eye catching flyers like last semester) that I missed the first three of the year. The good news is that if you search for it, you’ll find that this semester’s schedule has lectures planned almost every week. Last week’s guest speaker was Dr. Oussama Khatib, who is a member of Stanford University’s Artificial Intelligence Lab and Professor in computer science. Furthermore, he is the President of the International Foundation of Robotics Research. Dr. Khatib presented his research which focuses on human-centered and human-friendly robotics. Continue reading “Dr. Khatib, Georgia Tech RIM Seminar Series”
Dr. Leonard, Georgia Tech RIM Seminar Series
Several weeks ago , I had the pleasure of attending another lecture organized by the Robotics Initiative at Georgia Tech . This time the speaker was Dr. John Leonard who presented his current research in Simultaneous Localization And Mapping (SLAM). Dr. Leonard is a member of MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL). His lecture was an amalgamate of theory, research applications, and future aspirations.
Dr. Leonard concisely describes SLAM by saying on his website:
The problem of SLAM is stated as follows: starting from an initial position, a mobile robot travels through a sequence of positions and obtains a set of sensor measurements at each position. The goal is for the mobile robot to process the sensor data to produce an estimate of its position while concurrently building a map of the environment.
Continue reading “Dr. Leonard, Georgia Tech RIM Seminar Series”