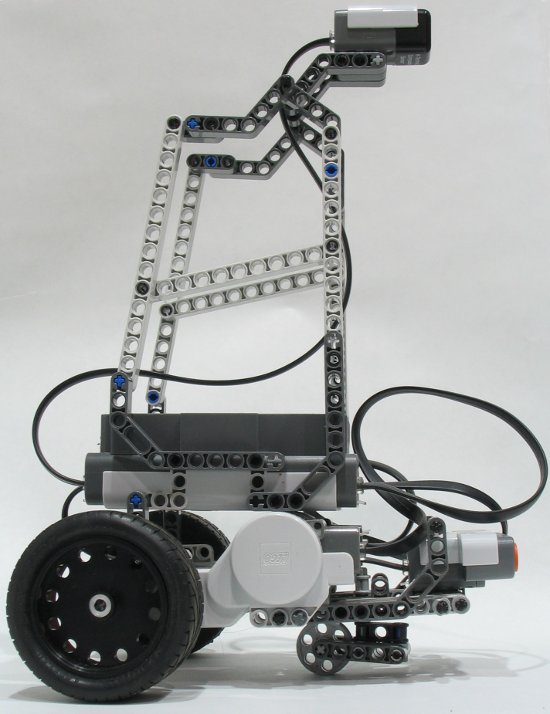
So in the course of finishing what would have been part 3 of this project, the post processing, I decided that some design changes needed to be made to the robot. I made two hardware changes: larger drive wheels and the addition of a compass sensor.
So in the course of finishing what would have been part 3 of this project, the post processing, I decided that some design changes needed to be made to the robot. I made two hardware changes: larger drive wheels and the addition of a compass sensor.
As part of my ME degree from Georgia Tech, I had to take a class called Experimental Engineering (ME 4055). It was a senior level class where students worked in teams to complete a project that mimicked the research cycle of a PhD student or professor. The team was required to design and conduct a set of experiments, evaluate the results, and then write a paper. For most students this was a rather bogus class. Students were limited to a small amount of hardware and research areas, and each semester’s reports looked all too similar to previous. I, however, had the very special chance of taking this class with Adam Reich during my semester abroad at Georgia Tech Lorraine (GTL), which meant working with Dr. William Singhose and his PhD student, Jason Lawrence. They were at GTL to teach several other classes (another one I was also in, ME 6401 Linear Control Theory) and to continue/promote their research with a highly portable, miniature gantry crane.
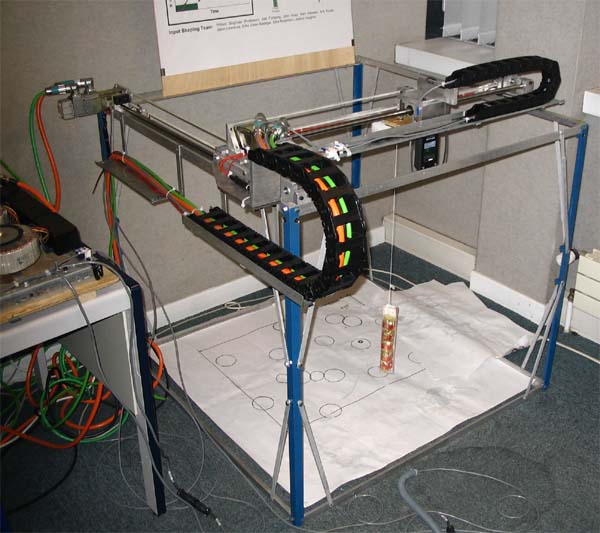
The mini gantry crane setup at GTL. Continue reading “Past Project: Input Shaper Testing”
After assembling the hardware for my SLAM (Simultaneous Localization and Mapping) robot, I set about to write the code which controls the drive motors, senses obstacles, and records the robot’s path. Lego’s NXT kit comes with a rather basic visual programming language called NXT-G. This program, which constructs programs by creating essentially flow charts, is almost counterintuitive to anyone with command line programing experience. I decided instead to use the third-party programming language called Not eXactly C (NXC) and its associated IDE, Bricx Command Center. Continue reading “SLAM-5 Bot part 2: The Control Algorithm”
Last month the FIRST Robotics National Championship was held at the Georgia Dome, only several blocks from my house, so I ventured over to report on the events lasting from Wednesday to Saturday. The entire extravaganza was sponsored by Vex, Lego, and NASA, amoung others. The National Championship in Atlanta is the culmination of regional competitions throughout the US and Canada. Three separate events were simultaneously taking place under one roof. The FIRST Lego League (FLL) and FIRST Tech Challenge (FTC) are both kit-based problem solving competitions for kids aged 9-14 and high school students. Additionally, the FIRST Robotics Competition (FRC) is an open-ended design competition which allows high school students the freedom to construct their robot from the materials of their choosing. The three competitions are entirely different; each has a unique playing field, set of objectives, and scoring method. Continue reading “Reporting In From The FIRST Lego Robotics Competition”
I have plans to utilize the Lego NXT system for several upcoming robotics projects. The success of these projects depends on the capabilities of the kit’s ultrasonic (US) range finder. I created a test rig with the US sensor and NXT brick and conducted several experiments in order to characterize the sensor.
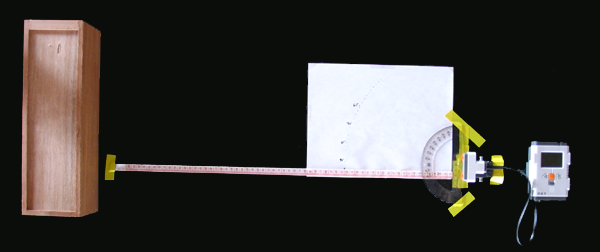
Test rig: wood block, measuring tape, protractor, US sensor, NXT brick (from left to right). Continue reading “Performance Testing NXT’s Ultrasonic Range Finder”