After assembling the hardware for my SLAM (Simultaneous Localization and Mapping) robot, I set about to write the code which controls the drive motors, senses obstacles, and records the robot’s path. Lego’s NXT kit comes with a rather basic visual programming language called NXT-G. This program, which constructs programs by creating essentially flow charts, is almost counterintuitive to anyone with command line programing experience. I decided instead to use the third-party programming language called Not eXactly C (NXC) and its associated IDE, Bricx Command Center. Continue reading “SLAM-5 Bot part 2: The Control Algorithm”
Reporting In From The FIRST Lego Robotics Competition
Last month the FIRST Robotics National Championship was held at the Georgia Dome, only several blocks from my house, so I ventured over to report on the events lasting from Wednesday to Saturday. The entire extravaganza was sponsored by Vex, Lego, and NASA, amoung others. The National Championship in Atlanta is the culmination of regional competitions throughout the US and Canada. Three separate events were simultaneously taking place under one roof. The FIRST Lego League (FLL) and FIRST Tech Challenge (FTC) are both kit-based problem solving competitions for kids aged 9-14 and high school students. Additionally, the FIRST Robotics Competition (FRC) is an open-ended design competition which allows high school students the freedom to construct their robot from the materials of their choosing. The three competitions are entirely different; each has a unique playing field, set of objectives, and scoring method. Continue reading “Reporting In From The FIRST Lego Robotics Competition”
Coffee Science and My Octane Barista Certification
I regularly find myself explaining to people about my experiences working at the most forward-thinking coffee shop in the city. To paraphrase my usual explanation: “Octane Coffee is dedicated to a continual evolution toward providing the best coffee possible by endlessly educating its employees and customers about the many facets of coffee cultivation, production, and preparation.” This education is founded on both technical training and technical knowledge of coffee. I’ve done an extensive amount of exploring through my exposure to the coffee world. Several of these experiences are documented here.
 Pulling two shots during my barista certification. Photo by John Cole.
Continue reading “Coffee Science and My Octane Barista Certification”
Pulling two shots during my barista certification. Photo by John Cole.
Continue reading “Coffee Science and My Octane Barista Certification”
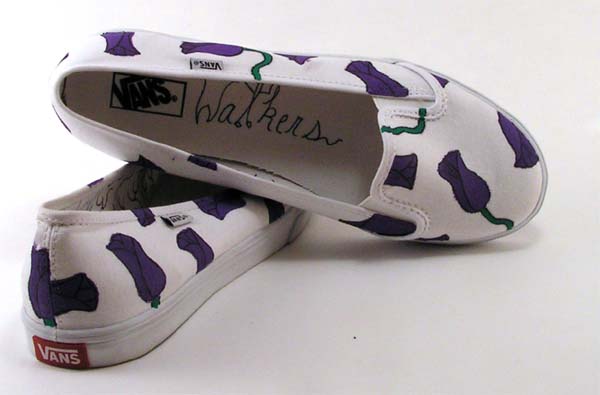
More Shoes and Light Tent
I painted another pair of shoes, this time for my friend, Jaime Walker. I call them “walkers”. Rather lame, I know. I started with Vans KVD’s, courtesy of Rená at Abbadabba’s. I used the same brand paint as previous shoes and added purple tulips with green stems. I then outlined the flowers with a fine-tip permanent marker. I began by using a “very fine” tip, however the paint dried out the marker tip. I then switched to a fatter “fine” tip marker and with enough finesse, I was still able to draw very thin lines.
I decided not to dye them because I have had problems with other shoe-dying projects lately. When dying bright colors such as red and navy blue, both the canvas and the rubber changed color. Also, as I learned the hard way, it is impossible to bleach black canvas Vans white. I tried to make white shoes with black soles by starting with the black/black Vans slip ons. The fabric disintegrates very quickly and begins to rip after coming into direct contact with bleach.
Anyways, I learned a lot during this project about delicacy and patience. Its not easy to fix a mistake on white canvas. Slight smudges of purple are obvious in one of pictures below.
2007 Santa’s Little Messenger Race
This year, like last, I decided to hold the Santa’s Little Messenger Bicycle Race benefiting Atlanta’s Toys For Tots program. The concept behind the race is that individuals and businesses around town, who were going to donate a toy to Toys For Tots, register the toy with me via a web form instead of finding a local drop off point. Then, on the day of the race, riders picked up the toys and returned them to the “base”. Two categories of racers (solo and two-person teams) competed to earn the most “toy miles”.
The race began almost immediately with a terrible rain storm but all the riders really toughed it out and did a great job. This year, seventeen racers (six teams and five solo racers) collected 96 toys. The complete results are available on Faster Mustache.org.